
METE
The Autonomous Storm Response Specialist
Precision-engineered UAV systems designed for autonomous mission execution
Technical Overview
METE is a high-performance unmanned aerial system (UAS) specifically optimized for the SUAS 2026 'Storm Response' mission profile. Featuring advanced composite materials, redundant avionics architecture, and precision payload delivery mechanisms, METE represents the culmination of rigorous engineering analysis and innovative design solutions.
Technical Specifications
Max Takeoff Weight
< 35 lbs
Optimized for Rapid Response
Wingspan
1.8 m
Optimized Aspect Ratio
Powerplant
High-efficiency Electric Propulsion
28 minutes (full payload)
Autopilot
Pixhawk Suite with Custom ArduPilot Configuration
Advanced Navigation
Communication
915MHz Telemetry / 2.4GHz Control Link
Redundant Systems
Performance
Max Speed: 65 km/h
Cruise Speed: 45 km/h
Thrust-to-Weight Ratio: 2.1:1
| Parameter | Value | Notes |
|---|---|---|
| Max Takeoff Weight | < 35 lbs | Competition Compliant |
| Wingspan | 1.8 m | High Aspect Ratio Design |
| Flight Endurance | 28 minutes (full payload) | Full Mission Capable |
| Payload Capacity | 2.5 kg | Including Camera & Payload |
| Service Ceiling | 0-120 m AGL | Above Ground Level |
| Thrust-to-Weight Ratio | 2.1:1 | Excellent Climb Rate |
Design Rationale & Sub-systems
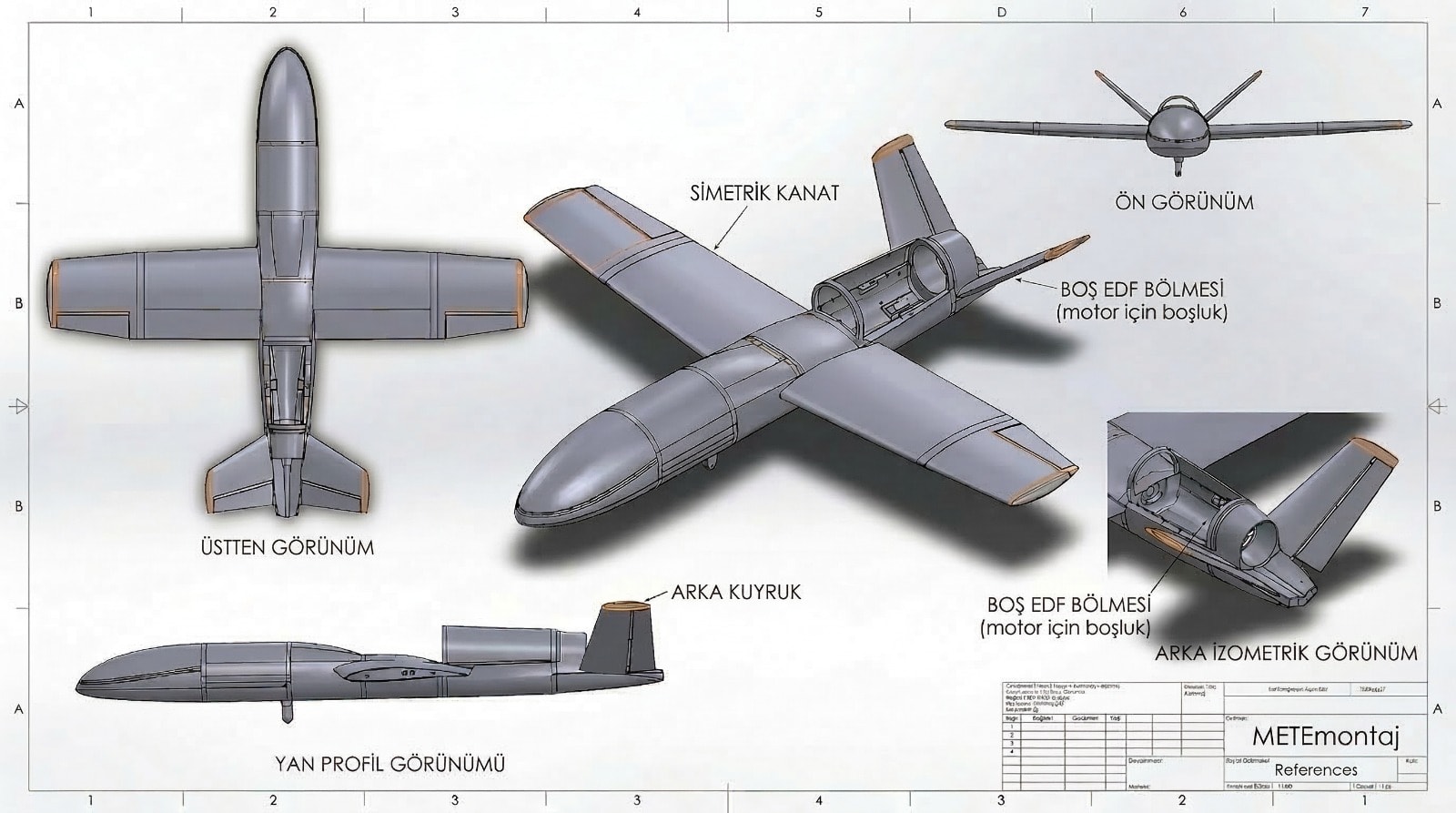
Aerodynamic Design
Optimized airfoil with high aspect ratio wing provides efficient lift generation and stability.
Propulsion System
Electric propulsion system with high-efficiency motor and optimized propeller for extended flight time.
Autonomous Navigation
GPS-guided waypoint navigation with real-time obstacle avoidance and precision landing capabilities.
Payload System
Precision payload delivery mechanism with 15cm accuracy from 50m altitude for storm response operations.
Aircraft Gallery
METE-S1
METE-S1
Our first generation autonomous unmanned aerial vehicle designed for SUAS competitions. Features advanced navigation and payload delivery systems.
View Details
100.Yıl
100.Yıl
Aerodynamic Design: High-stability Clark-Y airfoil with a 58 g/dm m^2 wing loading. Features a 6 degree ground AoA for superior Short Take-Off and Landing (STOL) performance. Propulsion System: Mid-mounted brushless motor with a 4S Li-Po setup, optimized for Center of Gravity (CoG) balance and secondary airflow for the mission mechanism. Autonomous Navigation: Fully autonomous flight via Pixhawk Cube Orange+; integrated Raspberry Pi 4 for custom AI-based Identify Friend or Foe (IFF) protocols. Payload System: AI-triggered, modular defensive mechanism integrated into the landing gear, utilizing aerodynamic airflow for enhanced particle deployment range.
View Details
v6
v6
Aerodynamics: Optimized with 3D modeling and a Clark-Y airfoil for high lift and low-speed flight stability. Propulsion: Mid-mounted brushless motor powered by a 4S 2800 mAh Li-Po system for balanced efficiency. Navigation: Fully autonomous operations via Pixhawk Cube Orange+ and Raspberry Pi 4 for AI-driven target identification (IFF). Payload System: An AI-triggered, servo-controlled modular mechanism utilizing airflow-assisted ejection for precision delivery.
View Details
Gazi
Gazi
Aerodynamics: Stable high-wing configuration, 3-piece modular assembly, and drag-optimized geometry. Propulsion: Efficient, lightweight mid-mounted motor for enhanced protection and clean airflow. Navigation: Fully autonomous Pixhawk 2.4.8 control with multi-sensor fusion and directional stability. Payload: Internally integrated sequential release system and shock-absorbing landing gear.
View Details